Basic Components of a Robot: Part 2
In the previous topic, we saw the hands, feet, muscles, and skeleton of the robot. But they just make its outer body. What makes it move? How does it understand and do what we ask it to do?
Let’s find out!
THE ‘SENSES’
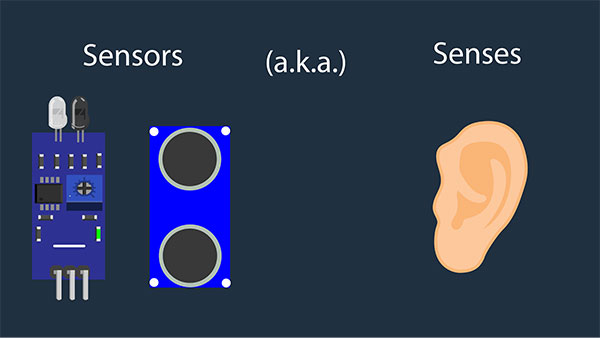
A sensor is a device that detects input from the outside world and responds to it. Just like we have many different types of senses and different ‘sensors’ for them, such as eyes for seeing, ears for hearing, nose for smelling, tongue for tasting, and skin for touching, robots are also capable of sensing different things such as light, sound, and temperature, and have many different sensors for them. Some of them are:
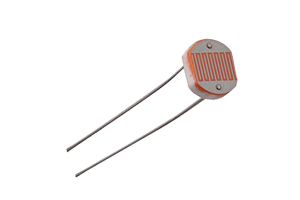
- Light Sensors: For e.g. Light Dependent Resistor (LDR)

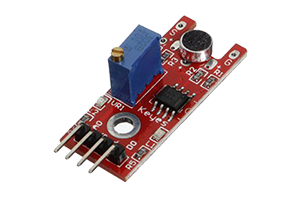
- Sound Sensors: For e.g. Microphone
- Temperature Sensors: For e.g. LM34 ICs (IC – Integrated circuits)
- Proximity Sensors: For e.g. IR Sensors
- Distance Sensors: For e.g. Ultrasonic Distance Sensor


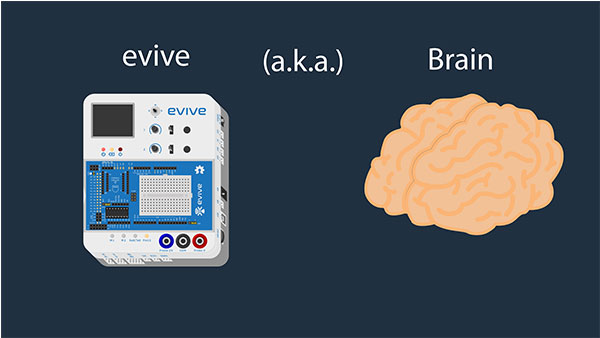
THE ‘e-BRAIN’
The robot has detected all that is happening around it. Now, it has to respond to it. But it needs to make sure that it does to correctly. Who or what is going to tell him what to do, and how to respond in the right way?
Come in, the brain of the robot.
The brain is responsible for controlling all the senses, and, functions of the body, such as thinking (I think, therefore I am), eating, sleeping, and moving the arms and the legs.
The robot’s brain also does the same. It controls what it thinks, what it does, and how it moves its arms and legs.
THE COMMANDS
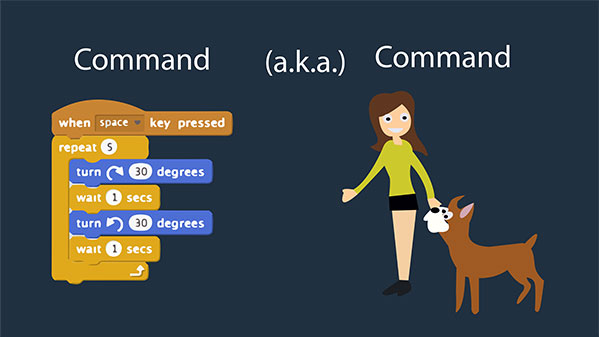
At this moment, our robot’s got everything; right from the brain down to the feet. But since it is not exactly a human, it still doesn’t know as of yet what to do and how to do it. Here come in play the commands.
Your mom must have ordered you to do certain things; things you like, and things you don’t like. And you know that you have to follow them because she is your mom. Now, you have your chance, your opportunity, to make up for it. This time, you will give commands to the robot and ask it to do what you want him to, and he has to follow them!
These commands that we are talking about are nothing but the instructions that are given by writing a program for the specified task.